起重机安全监控系统-为工业安全保驾护航
恺德尔·专注·技术领先

恺德尔·专注·技术领先



1 绪 论
1.1 研究目的和意义
随着农业、工业、建筑业和交通运输业的发展,各行各业起重机械的应用越来越多,目前起重机不断朝着大型化、自动化、网络化和智能化方向发展。由于起重作业是一种事故多发性的作业,为了保证起重机在安全限度内工作和操作人员能安全驾驶,起重机的安全运行 则成为一大研究重点。
目前,起重机发生故障较多、监管工作不足,而起重机作为重要 的起重设备,运用又如此之广,安全运行则成为首要问题,同时提高作 业效率也是相当必要。现代监控技术是集计算机技术、通信技术、网络技术和控制技术为一体,也是对信息技术和监控技术的集成。它不仅可以减少操作人员的工作强度、降低生产成本、提高生产率,且可以随时监视设备的运行状况,给维护带来极大的方便。如果起重机上应用安全监控管理系统,则能高效快捷地监控起重机械的运行状态,提高装卸效率,增强安全性能,减少故障时间,这将显著改善目前起重机械的监管状况,提高管理的现代化水平。所以,面对我国起重机以 及起重机械的现状,开发起重机的监控管理系统有着必要性和紧迫性。目前,起重机生产企业以及其他相关单位,在国家标准与规程的强制 要求下,起重机安全监控与数据传输系统的设计与实现给起重机安装 各类安全保护装置,比如:起升限制器、行程限位、超速保护装置等。然而,在以上参数都满足的情况下,起重机仍存在危险区间;某些型 号起重机运行的效率相对较低,无法发挥起重机的最佳作用;在施工过程中,为了提高效率、方便及提高吊载重量等原因,经常使起重机 工作在缺少某种限制器甚至完全没有限制器的状态下;为了降低成本,提高起重机利用率,起重机通常运行在满载荷的工作状态下,甚至于在一些恶劣天气环境下要仍然工作,这些情形很容易导致起重机危 险事故的发生。如果仅仅使用了各种被动单一式的安全保护装置,在起重机到达设计极限状态时发出警报,安全保护装置便中断起重机 的当前工作停机避险,这就大大降低了起重机的使用效能。
本文以通用起重机械安全监控管理系统为研究对象,要求故障时 间少、操作安全。所以本文提高起重机安全运行性能,提高装卸效率,加强对电气故障的监测和诊断功能为目标,经过数据的积累可提高起 重机的效率完善优化起重机的操作工艺和流程,提出起重机安全运 行的最佳方式,即在保证安全的情况下尽量提高工作效率,希望起重 机有较强的自控能力及自动错误诊断能力,能够在起重机由安全状 态进入临界安全状态时,通过显示、声音等多种手段报警,使得操作 人员避免错误操作,避免被动停机;采用监控管理技术,来减少操作人 员工作强度,提高生产率,实时监视设备运行状况和产生故障报警 功 能,加强起重机系统和操作人员的安全性,并提供历史数据查询,为维 护和修理 带来极大的方便。
从长远的考虑,安全监控管理系统对起 重机械的发展有长足的帮助,起重机械结构设计来源于理论计算和 设计经验,由于起重机械以安全第一为前提的特殊性,结构设计往往 满足设计整体选 型偏大,造成资源浪费,或者由于工艺的改变导致部 分设计不合理,造成起重机械起重某部件选型不合理,与整个系统不 匹配,造成系统安全度下降或运行效率下降。起重机械安全监控提供对其完善的监控,可长期直接或间接的测量起重机械运行参数,同时记录操作员的输人指令和起重机载重情况,根据这些长期的、实际投人使用的设备的详细参数,起重机的设计者、研究人员可获取同批次类似型号起重机大量完整可靠的大量数据,从而对在用起重机做出疲 劳分析、寿命评估,同时改进、改善起重机的设计,此项长期的工作功 在当代,利在千秋。
1.2 起重机监控系统的国内外发展概况
目前起重机已广泛应用于农 业、工业、建筑业和交通运输业,但由于起重作业是一种事故多发性 的作业,为了保证起重机的安全运行,起重机的安全系统则成为一大研究重点。达到起重机的安全运行系统重要的是能够安全运行和实 现监控系统。
1.安全运行是指起重机操作后大车、小车、起升、吊具等每一机 构能准确运行,达到安全驾驶的目的,要具有高性能高稳定性的控制系统。
2.监控系统是指监视起重机的重要元器件,实时了解起重机的运 行情况、工作状况及重要数据。监控系统能实现对起重机的实时监控、动态显示、实时故障报警及历史报警查询、生产过程量报表生成和具 有自诊断功能,这些功能将使起重机运行更加安全。
起重机中运用监控系统早已开始了,国外对于港口集装箱起重 机已使用 P L C 控制、计算机软件和无线局域网络实现对港口的调度以及对起重机的监控,能够随时随地监控现场,其他应用场合的起重机也都采用监控系统 进行操作、顺利运行。如德国汉堡港最为现代化的港口,采用了先进的装卸系统和智能化的监控系统。国外的技术水平已相当高,监控系统很发达,起重机监控系统向智能化、自动化 方向发展。目前国内起重机监控系统运用也很广,如中国的圳盐田国际集装箱码头早已采用远程监控系统,其他种类的龙门起重机和通 用桥式起重机的运用场合也已采用监控系统,但只是实现基本的监 视功能,主要都是在中心监控室进行监控。运用监控系统能大大加强 系统安全,减少事故发生。
1.3 本课题研究开发的主要内容
本课题主要研究起重机监控管理系统,采用西门子PLC 采集 架桥机信号,通过实时性较好的V C + + 编写实时性程序来实现监控管 理功能,实现对起重机的现场监控及数据管理,加强系统的安全运行。本文主要内容如下:
1.通过现场调研和相关文献阅读,了解架桥机监控系统的发展概 况,掌握架桥机的工作原理和结构特点。
2.确定起重机监控的变量,确定上位机与下位机、下位机与现场备间采取的通讯方式,提出系统的控制方案和网络结构。
3.利用西门子PLC系统、编程软件ST E P7完成起 重机 P L C 下位监控系统的程序设 计。
4.采 用 C + + 语 言实现上位监控记录功能。
2 安全监控管理系统的设计
2.1对安全监控系统的要求
安全监控管理系统的信息来源于起重机原电控系统,而起重机 种类繁多,非标设计较多,控制回路种类各异且逻辑复杂,为了与实 现记录功能的上位机相互通讯、实现连接,故需加入具备通用性模块化的采集单元,并该单元也应具备通用的连接技术。综合通用起重机工艺特点,监控要求、数据采集求以及国家相关标准,对安全监控管 理系统提出以下功能要求:
(l)系统具备记录起重机运行参数的能力。
(2)系统信息的采集应满足实时性要求,储存应满足原始完整性要求。
(3)系统储存的数据信息或图像信息应包含数据或图像的编号、时间和日期。
(4)系统的信息存储单元在关闭电源或供电中断之后,其内部的所有信息均应被保留。
(5) 系统能在存储容量达到设定的存储时间前提示管理人员提前备份保存。
(6)数据存储时间不应少于30个连续工作日,视频存储时间不应少于72 h。
2.2 系统方案的选取
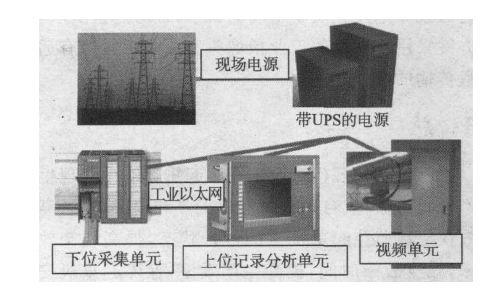
经过多方讨论和调研,课题组将系统分为四部分:
(1)电源单元
(2)下位采集单元
(3)上位记录、数据处理单元
(4)视频采集单元系统以通用起重机械安全监控管理系统设计,对各类起重机械做了深人的调研,做出通用型设计,并针对各类起重机变化的工况,提出以模块化设计为主,针对不同现场情况和市场情 况提出优化。
下文以针对架桥机监控系统的情况作为为例,介绍安全监控管 理系统的实现。
2.3 架桥机结构和特点
架桥机是架桥机是在公路、铁路轨道上行驶、用于整跨架设跨梁 的桥梁施工机械。架桥机属于起重机范畴。但其与一般意义上的起重 机工艺特点有很大的不同。其工作环境条件恶劣,人员技术水平偏低,工况危险风险高,重大安全事故较为多发。架桥机由于其使用环境恶 劣,由于其工艺和环境原因其配备的维护力量较差,所以很多其电控 系统采用了继电器回路或低配 P L C,故而好多型号架桥机原电控系统基本不具备现代高速通讯能力。
架桥机具备以下特点:
(1) 架桥机由于其工艺和结构特点决定,其使用上存在隐患。
(2) 由于现场环境恶劣及相关条件缺乏,安装调试人员安全隐患很大。
(3) 公路和铁路普遍采用承包制,工期非常紧张。
(4) 架桥机使用特点:很依赖人员的专用非标搬用设备。
架桥机设备环境有以下特点:
(1) 现场为野外,环境极为恶劣,施工环境隐患多。
(2) 现场条件极差,即便在正常施工条件下,工装采用现场制作,非标性较强。
(3) 现场的电源不稳定,完善接地很困难。
针对架桥机工艺特点,对系统各个单元分别以下形
式实现。
2 .3.1电源子单元
架桥机现场情况比较复杂,电源可从当地接人临时电源也可接入发电机电源,由于其环境影响,完善可靠地接地很困难。同时由于电源来源不稳定,现场可能经常断电。
为 了保证监控系统的正常运行,对电源子单元提出以下优化:
(1)电源子单元对做了隔离强化,从而保证系统不因为电源受干 扰,是监控得到的数据可信。
(2) 对系统采用不间断电源供电,保证系统在意外断电后仍然 可正常运行一段时间,并记录当时情况。
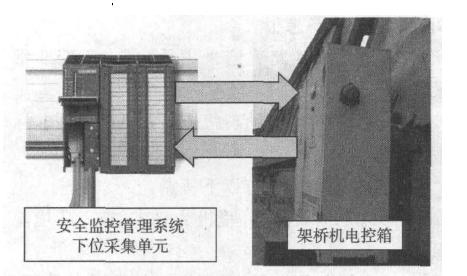
2 3.2 下位采集单元
由于架桥机工艺、使用环境特点因素决定,其控制回路为老式 继 电器回路,经过选型和多方对比,最终选用西门子S7300PLC作为下位采集单元,上位机采用自主开发的监控软件来实现 监控记录等功能,上位机与下位机之间采用工业以太网连接,通讯协议采用具备通用 性的OPC( OLE for Proeess Control,用于 过程控制的OLE )协议。
采用西门子PLC可实现模块化设计和较为简单的维护操作,下 位采集单元的接人与架桥机采用硬接线方式连接。该单元作为监控 管理系统与架桥机的双向纽带。选用用西门子 P L C 的意义:
(l) 西门子S7300PLC 通用性较强。
(2) 具备较高的灵活性、扩展及裁剪性。
(3) 下位硬件需具备良好的抗干扰能力。
2.3.3上位记录、数据处理单元
此单元为监控系统的记录部分,系统功能最终在此单元来实现,针对起重机工艺特点和监控要求,提出了下位监控系统的要求:
(1)实时存储下位采集单元传送人的运行状态及故障信息。
(2)实现归档等事故追溯功能。
(3)系统自校验功能,保证自身的可靠。
(4)实时显示架桥机运行状态及故障信息。
(5)实现滤波和数据转换的功能。
(6)逻辑控制及系统综合配置。
根据以上功能要求及下位采集单元的接口问题,下位方案定为 以工控机为核心的方案。上位机采用 V C + + 编写具备实时性的监控软件。
针对以上设计要求,对上位记录、数据处理单元硬件做出以下优化:
(l)选用被动散热主板。即主板上无机械风扇,采用散热片散热。
(2)屏幕机身一体化设计,并选用触摸屏。
(3)内部弃用机械硬盘,采用抗震的闪存式固态硬盘。规避工控机 内部对震动最敏感的部件。
(4 )电源输人加人 D C D C 直流稳压模块。监控软件具备通过O PC与西 门子 P L C 通讯的能力,实时记录了起重机的运行参数。选用O P C 技术的原因:
(l)具备通用性。目前主流的工控厂商 支持该技术。
(2)其技术具备硬件和软件独立性,适合作为通用产品。为安全监控管理系统通用化做准备。
(3)技术开放,软件基于其具备对内透明的特性。针对安全监控管理系统对实时性要求很高,上位软件采用 C十十作为主要编程软件编写,其具备很高效的程序运行效率和最大便捷 性。数据采用了扩展性 和性能均衡的 SQ Lite文件 型数据库。
与监控软件配套还有数据分析 软件,可结合起重机机构特点与 采集到的数据分析起重机的详细参数,做出针对性很强的疲劳分析、寿命评估,同时改进、改善起重机的设计。监控软件还具备与远程传输的能力,以实现数据的实时传送,为集中控制和起重机集群的监控 做准备。
2、3.4 视频采集单元
安全监控管理系统要求了视频监控,考虑到其和监控性能的主 系统关联度不大,如果与监控系统合并,则非常耗费资源,并可能导致 整个监控系统稳定性下降,故将其独立。
架桥机监控点标 准要 求:过孔状态、架梁状态、运梁车同步状 态。其中针对运梁车同步状态监控,运梁车长达60 m,监控角度不到 30度。有两个探头装在架桥机的前端,距离不小于 80 m,可能存在干扰现象。这对视频采集提出了很高的要求,针对这些要求,方案采用 了专业的工业摄像头和摄录机并留有远程传输的接口和能力。
3 总 结
起重机是现代工业生产和起 重运输中实现生产过程机械化、自动化的重要工具和设备,为了高效快捷地监控起重机械的运行状态,提高装卸效率,减少故障时间,提高生产效率,保障起重机安全运行,不论在学术上还是工程上都意义重大,本文开展了对通用起重机安 全监控管理系统的研究,并以架桥机安全监控管理系统为例做出设 计。
本文分析系统的结构特点与功 能,结合现代监控系统的发展概况,通过通讯方式的比较,确定了上位机、下位机、现场设备间的通讯 方式,并采用西门子 5 7一300 的 P L C 监 控架桥机,用 S T E P 7软件完成程序设计,用 C + 十 开发设计上位机监控软件,完成提出的要求。